SYMROP
Multi Robot Framework for Cooperation of Robots
| What is SYMROP? | Overview | Framework | Ad-hoc wireless communication | Application | Demo | About Us |
What is SYMROP?
−SYMROP− Multi robot framework for robots to communicate with each other efficiently.
SYMROP was developed with the support of Mitou Project 2006. This was introduced inIPAX2007.Nii Open House 2007.
Overview
SYMROP is made for programming multi-robots cooperation tasks easily.
We developed a framework by which many robots can cooperate with each other easily. Also, these robots are connected by ad-hock network, hence no centric server is required. Also we came up with a new ad-hoc wireless communication protocol which is optimized to multi robot communication. By using SYMROP, it’s easy to create a program for cooperation multi-robots by overriding multi-robot interface provided by SYMROP.
Framework
Structure of SYMROP
Robots will cooperate with each other by using multi robot command interface.
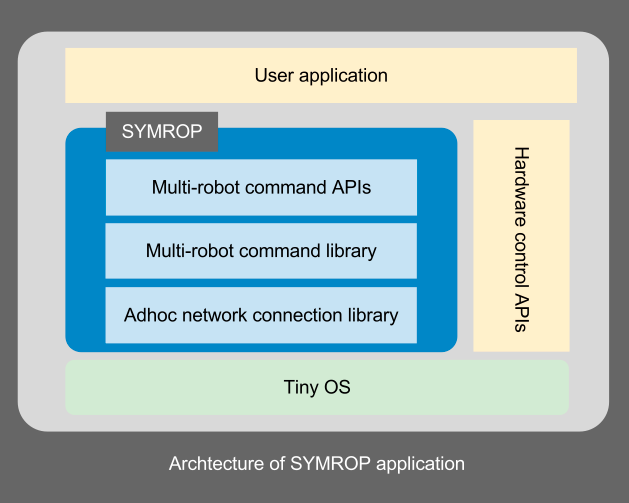
Multi robot command interfaces
Single action will be shared by available robots by following command interfaces.
Expandability
Client applications can come up with several multi robot commands by overriding multi robot command interfaces. And SYMROP will run these commands.
Ad-hoc wireless communication
SYMROP provides fast and low-cost communication.
The original protocol was developed for SYMROP. Because the network can be very unstable because robots can move fast and also there can be obstacles for wireless communication. And also robots are connected by ad-hoc network and these connections can be disconnected frequently. So, we had to come up with the robust protocol which can be used in such kind of very unstable situation.
Application
Multi-robot monitoring system
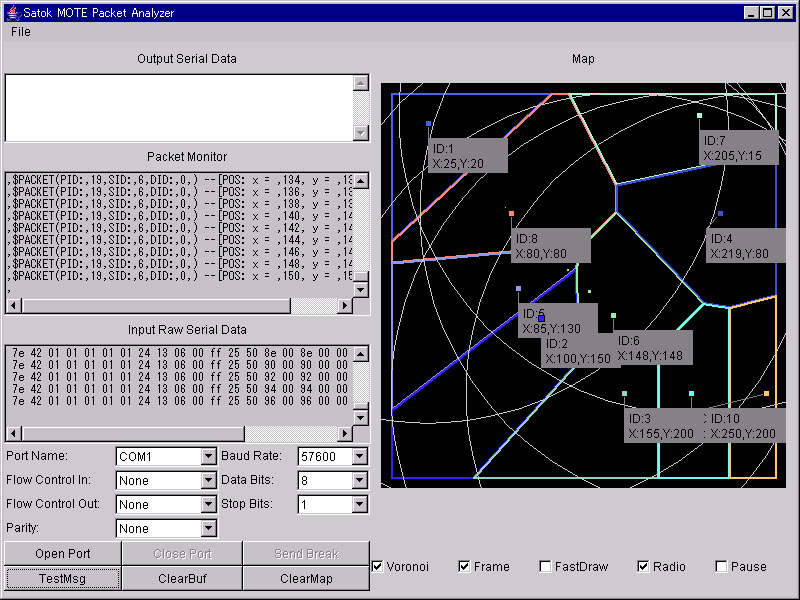 |
■Multi robot monitoring system ・Track the locations of robots ・Show conditions of robots ・Show radio ranges of robots ・Analyze packets from robots ・Show the area where robots are available ・Send commands manually |
Hardware for SYMROP
 |
■SYMROP hardware ・SYMROP and client application which is run on SYMROP will be installed. ・Have a functionality to simulate robots activities ・Low cost hardware -Zigbee -RAM 4KB -ROM 128KB |
Screen shots
DEMO〜 Repairing building agent system by SYMROP〜
 |
Purpose |
About US
Copyright (C) 2006-2007 Satok Systems. Satoq. The unversity of Tokyo and NII
Satoshi Kataoka
Contact info. http://twitter.com/satok_